





































































1/1





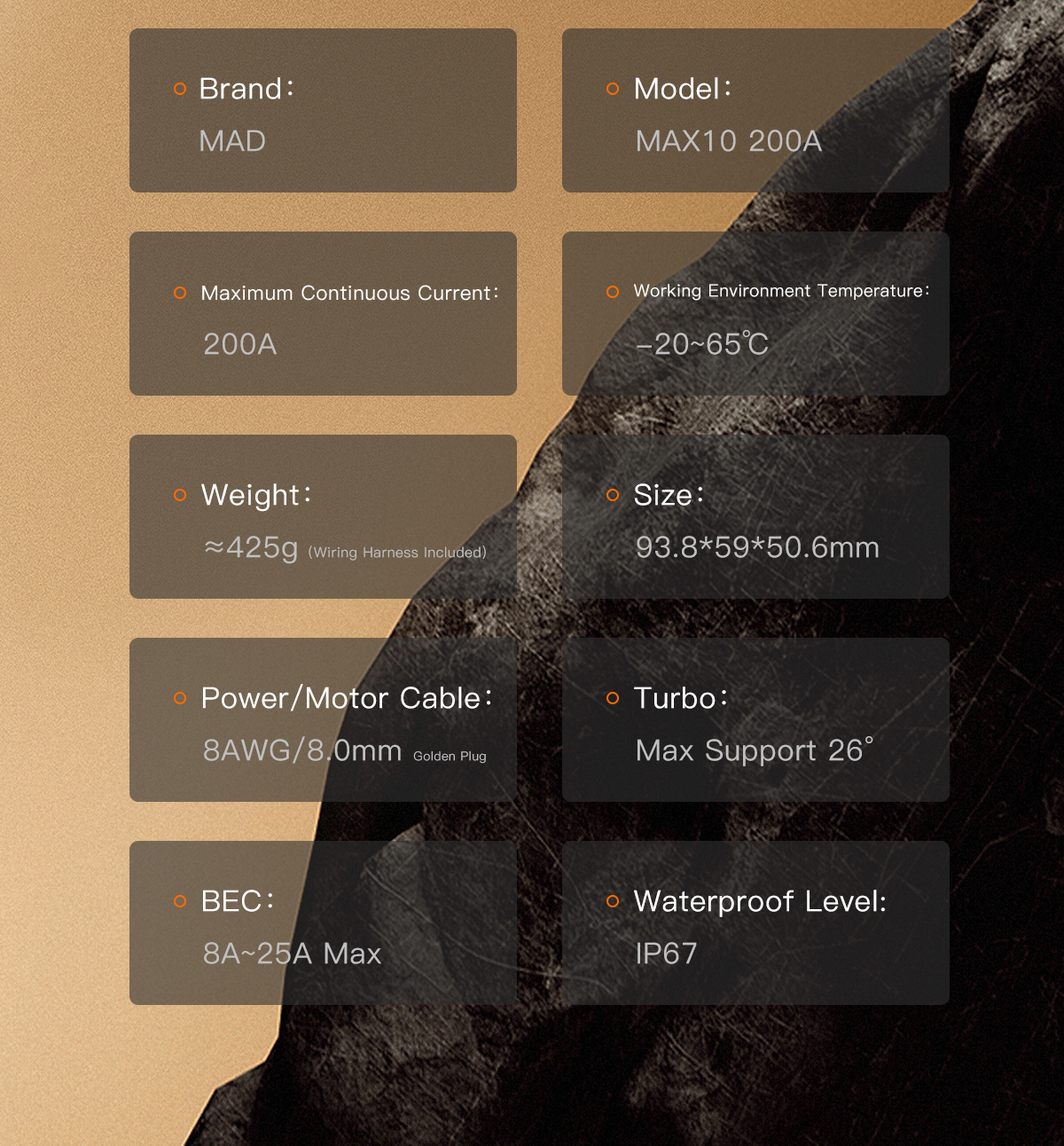
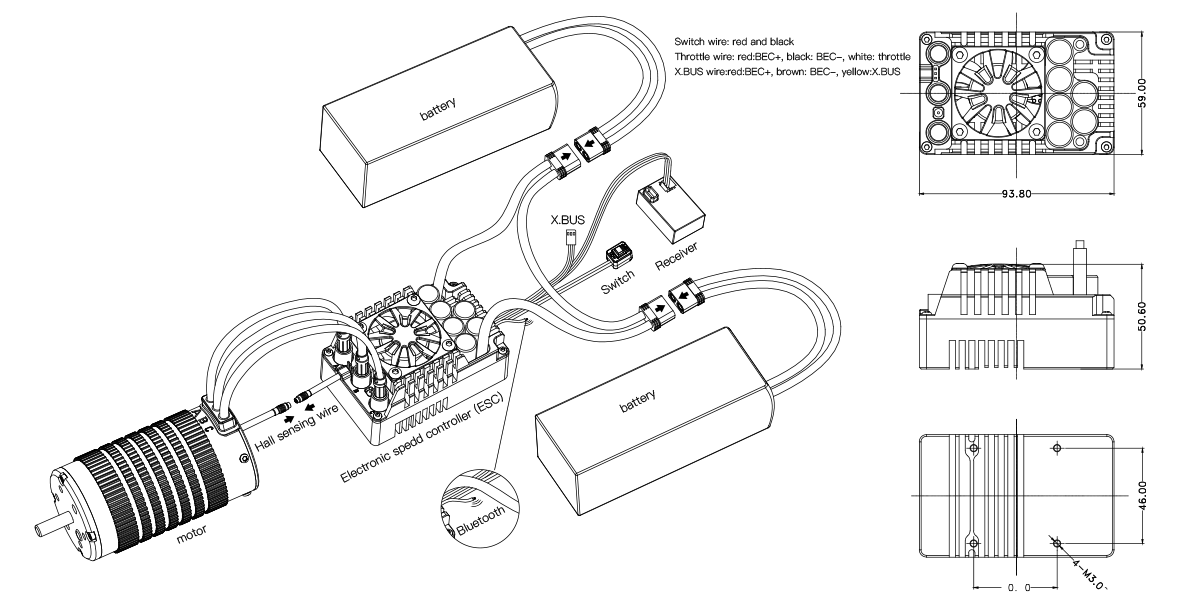
MAX10 200A HV 6-12s Brushless Sensored ESC for 1/5 RC model car
SKU: 0102DT0249
🔥 STOP WASTING MONEY ON OVERHYPED ESCs! 🔥
MADMAX ESCs DON’T CARE ABOUT YOUR LOYALTY TO LEGACY BRANDS.
Why pay premium prices for a competitor’s mediocre 32-bit ESC just because they’ve been around longer? Wake up.
THIS IS WHAT REAL PERFORMANCE LOOKS LIKE:
✅ Industrial-Grade 32-Bit Control – Not just another "smooth" ESC—ruthless precision that dominates on the track.
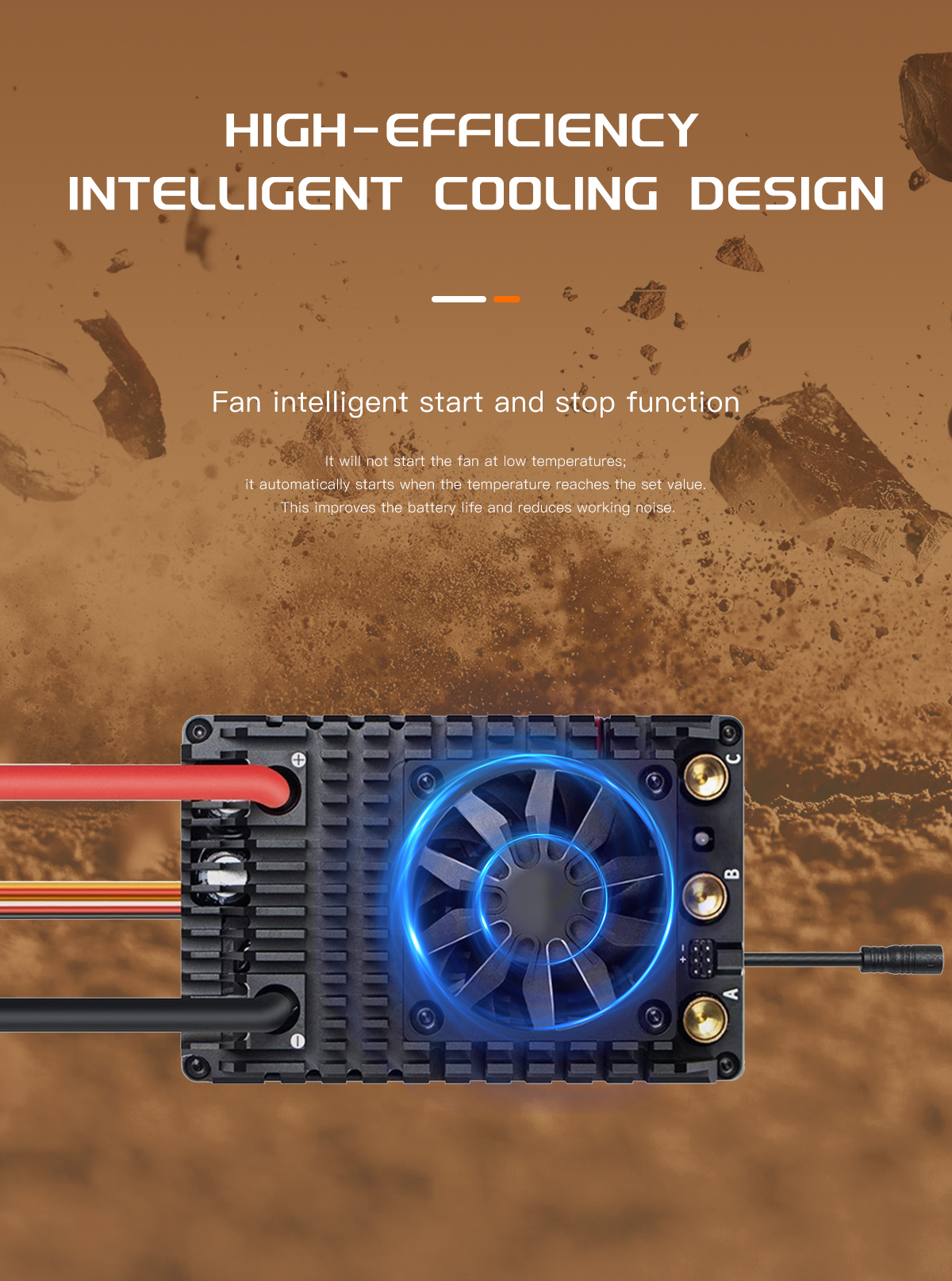
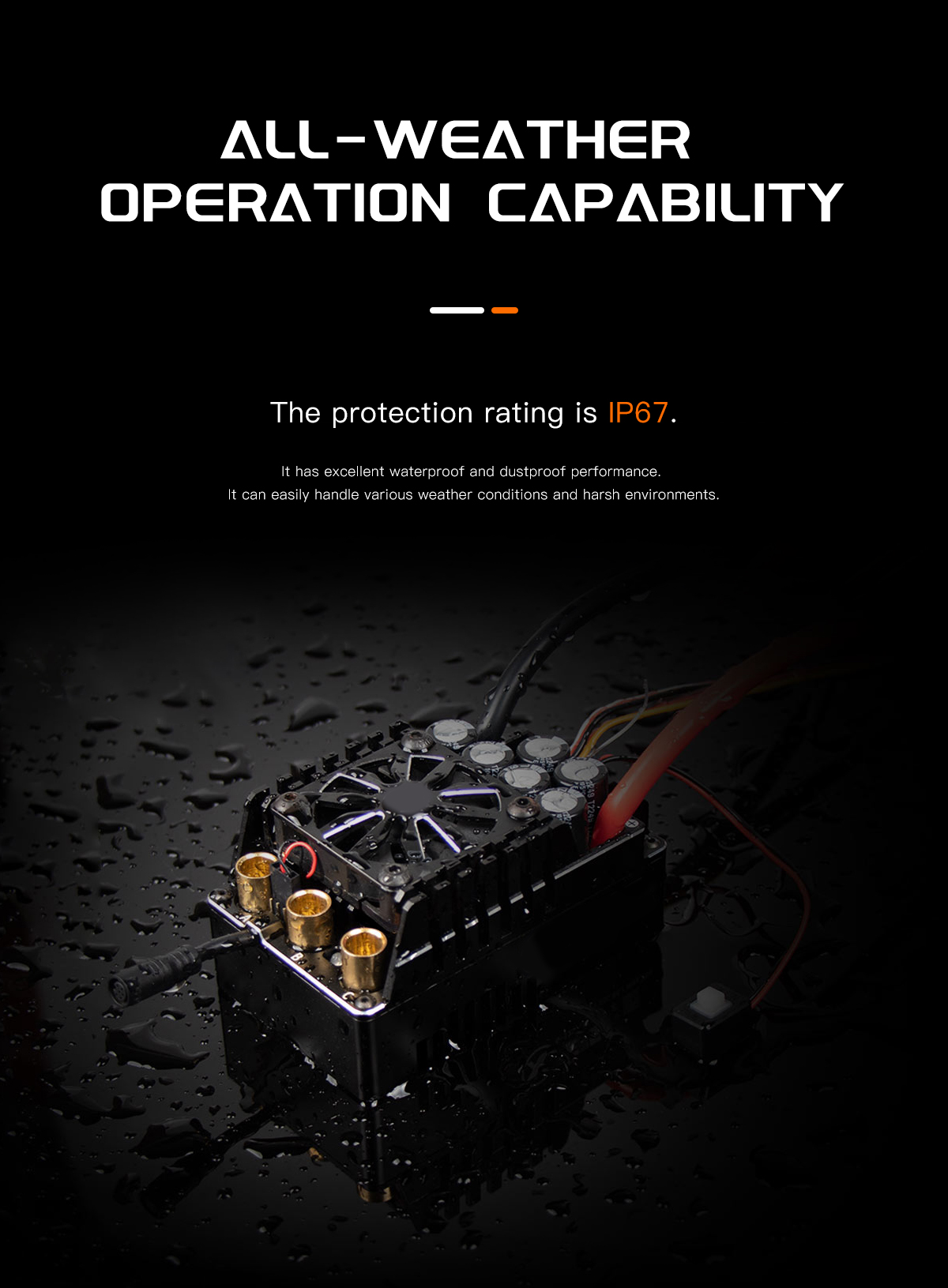
✅ Zero Compromise Reliability – While others fail under pressure, MADMAX LAUGHS AT HEAT, DIRT, AND FULL THROTTLE.
✅ Pro Features for Winners – If you’re still using that overpriced "big name" ESC, you’re racing with last-gen tech.
🚀 MADMAX ESCs: FOR THOSE WHO ACTUALLY WANT TO WIN. 🚀
Drop the fanboy excuses. Upgrade. Dominate.
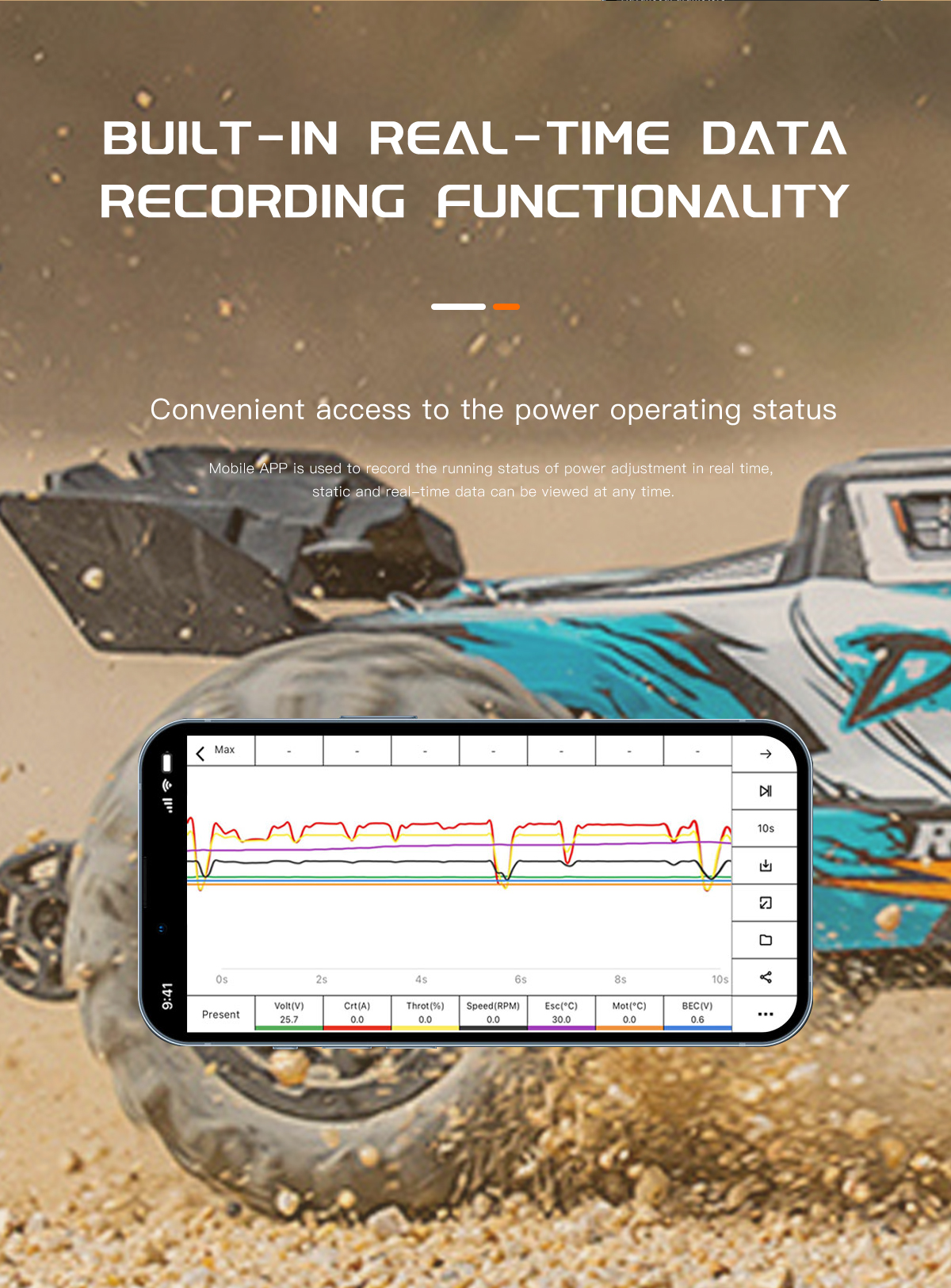
Click the button below to DOWNLOAD the corresponding Mobile APP.
$211.69





1/1